mirror of
https://github.com/THU-MIG/yolov10.git
synced 2025-12-21 03:25:39 +08:00
Add speed_estimation and distance_calculation in ultralytics solutions (#7325)
Co-authored-by: Glenn Jocher <glenn.jocher@ultralytics.com>
This commit is contained in:
parent
2f9ec8c0b4
commit
61fa12460d
89
docs/en/guides/distance-calculation.md
Normal file
89
docs/en/guides/distance-calculation.md
Normal file
@ -0,0 +1,89 @@
|
||||
---
|
||||
comments: true
|
||||
description: Distance Calculation Using Ultralytics YOLOv8
|
||||
keywords: Ultralytics, YOLOv8, Object Detection, Distance Calculation, Object Tracking, Notebook, IPython Kernel, CLI, Python SDK
|
||||
---
|
||||
|
||||
# Distance Calculation using Ultralytics YOLOv8 🚀
|
||||
|
||||
## What is Distance Calculation?
|
||||
|
||||
Measuring the gap between two objects is known as distance calculation within a specified space. In the case of [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics), the bounding box centroid is employed to calculate the distance for bounding boxes highlighted by the user.
|
||||
|
||||
## Advantages of Distance Calculation?
|
||||
|
||||
- **Localization Precision:** Enhances accurate spatial positioning in computer vision tasks.
|
||||
- **Size Estimation:** Allows estimation of physical sizes for better contextual understanding.
|
||||
- **Scene Understanding:** Contributes to a 3D understanding of the environment for improved decision-making.
|
||||
|
||||
???+ tip "Distance Calculation"
|
||||
|
||||
- Click on any two bounding boxes with Left Mouse click for distance calculation
|
||||
|
||||
!!! Example "Distance Calculation using YOLOv8 Example"
|
||||
|
||||
=== "Video Stream"
|
||||
```python
|
||||
from ultralytics import YOLO
|
||||
from ultralytics.solutions import distance_calculation
|
||||
import cv2
|
||||
|
||||
model = YOLO("yolov8n.pt")
|
||||
names = model.model.names
|
||||
|
||||
cap = cv2.VideoCapture("path/to/video/file.mp4")
|
||||
assert cap.isOpened(), "Error reading video file"
|
||||
|
||||
# Video writer
|
||||
video_writer = cv2.VideoWriter("distance_calculation.avi",
|
||||
cv2.VideoWriter_fourcc(*'mp4v'),
|
||||
int(cap.get(5)),
|
||||
(int(cap.get(3)), int(cap.get(4))))
|
||||
|
||||
# Init distance-calculation obj
|
||||
dist_obj = distance_calculation.DistanceCalculation()
|
||||
dist_obj.set_args(names=names, view_img=True)
|
||||
|
||||
while cap.isOpened():
|
||||
success, im0 = cap.read()
|
||||
if not success:
|
||||
print("Video frame is empty or video processing has been successfully completed.")
|
||||
break
|
||||
|
||||
tracks = model.track(im0, persist=True, show=False)
|
||||
im0 = dist_obj.start_process(im0, tracks)
|
||||
video_writer.write(im0)
|
||||
|
||||
cap.release()
|
||||
video_writer.release()
|
||||
cv2.destroyAllWindows()
|
||||
|
||||
```
|
||||
|
||||
???+ tip "Note"
|
||||
|
||||
- Mouse Right Click will delete all drawn points
|
||||
- Mouse Left Click can be used to draw points
|
||||
|
||||
|
||||
### Optional Arguments `set_args`
|
||||
|
||||
| Name | Type | Default | Description |
|
||||
|----------------|--------|-----------------|--------------------------------------------------------|
|
||||
| names | `dict` | `None` | Classes names |
|
||||
| view_img | `bool` | `False` | Display frames with counts |
|
||||
| line_thickness | `int` | `2` | Increase bounding boxes thickness |
|
||||
| line_color | `RGB` | `(255, 255, 0)` | Line Color for centroids mapping on two bounding boxes |
|
||||
| centroid_color | `RGB` | `(255, 0, 255)` | Centroid color for each bounding box |
|
||||
|
||||
### Arguments `model.track`
|
||||
|
||||
| Name | Type | Default | Description |
|
||||
|-----------|---------|----------------|-------------------------------------------------------------|
|
||||
| `source` | `im0` | `None` | source directory for images or videos |
|
||||
| `persist` | `bool` | `False` | persisting tracks between frames |
|
||||
| `tracker` | `str` | `botsort.yaml` | Tracking method 'bytetrack' or 'botsort' |
|
||||
| `conf` | `float` | `0.3` | Confidence Threshold |
|
||||
| `iou` | `float` | `0.5` | IOU Threshold |
|
||||
| `classes` | `list` | `None` | filter results by class, i.e. classes=0, or classes=[0,2,3] |
|
||||
| `verbose` | `bool` | `True` | Display the object tracking results |
|
||||
@ -31,16 +31,13 @@ A heatmap generated with [Ultralytics YOLOv8](https://github.com/ultralytics/ult
|
||||
|
||||
| Transportation | Retail |
|
||||
|:-----------------------------------------------------------------------------------------------------------------------------------------------:|:---------------------------------------------------------------------------------------------------------------------------------------:|
|
||||
|  |  |
|
||||
|  |  |
|
||||
| Ultralytics YOLOv8 Transportation Heatmap | Ultralytics YOLOv8 Retail Heatmap |
|
||||
|
||||
???+ tip "heatmap_alpha"
|
||||
|
||||
heatmap_alpha value should be in range (0.0 - 1.0)
|
||||
|
||||
???+ tip "decay_factor"
|
||||
|
||||
Used for removal of heatmap after object removed from frame, value should be in range (0.0 - 1.0)
|
||||
???+ tip "Heatmap Configuration"
|
||||
- `heatmap_alpha`: Ensure this value is within the range (0.0 - 1.0).
|
||||
- `decay_factor`: Used for removing heatmap after an object is no longer in the frame, its value should also be in the range (0.0 - 1.0).
|
||||
|
||||
|
||||
!!! Example "Heatmaps using Ultralytics YOLOv8 Example"
|
||||
|
||||
@ -37,6 +37,8 @@ Here's a compilation of in-depth guides to help you master different aspects of
|
||||
* [Heatmaps](heatmaps.md) 🚀 NEW: Elevate your understanding of data with our Detection Heatmaps! These intuitive visual tools use vibrant color gradients to vividly illustrate the intensity of data values across a matrix. Essential in computer vision, heatmaps are skillfully designed to highlight areas of interest, providing an immediate, impactful way to interpret spatial information.
|
||||
* [Instance Segmentation with Object Tracking](instance-segmentation-and-tracking.md) 🚀 NEW: Explore our feature on Object Segmentation in Bounding Boxes Shape, providing a visual representation of precise object boundaries for enhanced understanding and analysis.
|
||||
* [VisionEye View Objects Mapping](vision-eye.md) 🚀 NEW: This feature aim computers to discern and focus on specific objects, much like the way the human eye observes details from a particular viewpoint.
|
||||
* [Speed Estimation](speed-estimation.md) 🚀 NEW: Speed estimation in computer vision relies on analyzing object motion through techniques like [object tracking](https://docs.ultralytics.com/modes/track/), crucial for applications like autonomous vehicles and traffic monitoring.
|
||||
* [Distance Calculation](distance-calculation.md) 🚀 NEW: Distance calculation, which involves measuring the separation between two objects within a defined space, is a crucial aspect. In the context of Ultralytics YOLOv8, the method employed for this involves using the bounding box centroid to determine the distance associated with user-highlighted bounding boxes.
|
||||
|
||||
## Contribute to Our Guides
|
||||
|
||||
|
||||
@ -8,7 +8,7 @@ keywords: Ultralytics, YOLOv8, Object Detection, Object Counting, Object Trackin
|
||||
|
||||
## What is Object Counting in Regions?
|
||||
|
||||
Object counting in regions with [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) involves precisely determining the number of objects within specified areas using advanced computer vision. This approach is valuable for optimizing processes, enhancing security, and improving efficiency in various applications.
|
||||
[Object counting](https://docs.ultralytics.com/guides/object-counting/) in regions with [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) involves precisely determining the number of objects within specified areas using advanced computer vision. This approach is valuable for optimizing processes, enhancing security, and improving efficiency in various applications.
|
||||
|
||||
<p align="center">
|
||||
<br>
|
||||
|
||||
98
docs/en/guides/speed-estimation.md
Normal file
98
docs/en/guides/speed-estimation.md
Normal file
@ -0,0 +1,98 @@
|
||||
---
|
||||
comments: true
|
||||
description: Speed Estimation Using Ultralytics YOLOv8
|
||||
keywords: Ultralytics, YOLOv8, Object Detection, Speed Estimation, Object Tracking, Notebook, IPython Kernel, CLI, Python SDK
|
||||
---
|
||||
|
||||
# Speed Estimation using Ultralytics YOLOv8 🚀
|
||||
|
||||
## What is Speed Estimation?
|
||||
|
||||
Speed estimation is the process of calculating the rate of movement of an object within a given context, often employed in computer vision applications. Using [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) you can now calculate the speed of object using [object tracking](https://docs.ultralytics.com/modes/track/) alongside distance and time data, crucial for tasks like traffic and surveillance. The accuracy of speed estimation directly influences the efficiency and reliability of various applications, making it a key component in the advancement of intelligent systems and real-time decision-making processes.
|
||||
|
||||
## Advantages of Speed Estimation?
|
||||
|
||||
- **Efficient Traffic Control:** Accurate speed estimation aids in managing traffic flow, enhancing safety, and reducing congestion on roadways.
|
||||
- **Precise Autonomous Navigation:** In autonomous systems like self-driving cars, reliable speed estimation ensures safe and accurate vehicle navigation.
|
||||
- **Enhanced Surveillance Security:** Speed estimation in surveillance analytics helps identify unusual behaviors or potential threats, improving the effectiveness of security measures.
|
||||
|
||||
## Real World Applications
|
||||
|
||||
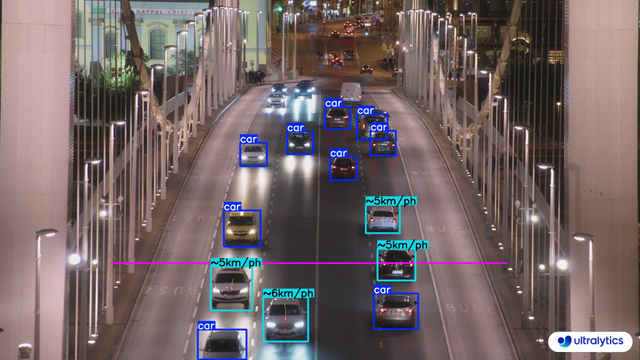
| Transportation | Transportation |
|
||||
|:-------------------------------------------------------------------------------------------------------------------------------------------------------:|:---------------------------------------------------------------------------------------------------------------------------------------------------------:|
|
||||
|  |  |
|
||||
| Speed Estimation on Road using Ultralytics YOLOv8 | Speed Estimation on Bridge using Ultralytics YOLOv8 |
|
||||
|
||||
!!! Example "Speed Estimation using YOLOv8 Example"
|
||||
|
||||
=== "Speed Estimation"
|
||||
```python
|
||||
from ultralytics import YOLO
|
||||
from ultralytics.solutions import speed_estimation
|
||||
import cv2
|
||||
|
||||
model = YOLO("yolov8n.pt")
|
||||
names = model.model.names
|
||||
|
||||
cap = cv2.VideoCapture("path/to/video/file.mp4")
|
||||
assert cap.isOpened(), "Error reading video file"
|
||||
|
||||
# Video writer
|
||||
video_writer = cv2.VideoWriter("speed_estimation.avi",
|
||||
cv2.VideoWriter_fourcc(*'mp4v'),
|
||||
int(cap.get(5)),
|
||||
(int(cap.get(3)), int(cap.get(4))))
|
||||
|
||||
line_pts = [(0, 360), (1280, 360)]
|
||||
|
||||
# Init speed-estimation obj
|
||||
speed_obj = speed_estimation.SpeedEstimator()
|
||||
speed_obj.set_args(reg_pts=line_pts,
|
||||
names=names,
|
||||
view_img=True)
|
||||
|
||||
while cap.isOpened():
|
||||
|
||||
success, im0 = cap.read()
|
||||
if not success:
|
||||
print("Video frame is empty or video processing has been successfully completed.")
|
||||
break
|
||||
|
||||
tracks = model.track(im0, persist=True, show=False)
|
||||
|
||||
im0 = speed_obj.estimate_speed(im0, tracks)
|
||||
video_writer.write(im0)
|
||||
|
||||
cap.release()
|
||||
video_writer.release()
|
||||
cv2.destroyAllWindows()
|
||||
|
||||
```
|
||||
|
||||
???+ warning "Speed is Estimate"
|
||||
|
||||
Speed will be an estimate and may not be completely accurate. Additionally, the estimation can vary depending on GPU speed.
|
||||
|
||||
|
||||
### Optional Arguments `set_args`
|
||||
|
||||
| Name | Type | Default | Description |
|
||||
|---------------------|-------------|----------------------------|---------------------------------------------------|
|
||||
| reg_pts | `list` | `[(20, 400), (1260, 400)]` | Points defining the Region Area |
|
||||
| names | `dict` | `None` | Classes names |
|
||||
| view_img | `bool` | `False` | Display frames with counts |
|
||||
| line_thickness | `int` | `2` | Increase bounding boxes thickness |
|
||||
| region_thickness | `int` | `5` | Thickness for object counter region or line |
|
||||
| spdl_dist_thresh | `int` | `10` | Euclidean Distance threshold for speed check line |
|
||||
|
||||
### Arguments `model.track`
|
||||
|
||||
| Name | Type | Default | Description |
|
||||
|-----------|---------|----------------|-------------------------------------------------------------|
|
||||
| `source` | `im0` | `None` | source directory for images or videos |
|
||||
| `persist` | `bool` | `False` | persisting tracks between frames |
|
||||
| `tracker` | `str` | `botsort.yaml` | Tracking method 'bytetrack' or 'botsort' |
|
||||
| `conf` | `float` | `0.3` | Confidence Threshold |
|
||||
| `iou` | `float` | `0.5` | IOU Threshold |
|
||||
| `classes` | `list` | `None` | filter results by class, i.e. classes=0, or classes=[0,2,3] |
|
||||
| `verbose` | `bool` | `True` | Display the object tracking results |
|
||||
16
docs/en/reference/solutions/distance_calculation.md
Normal file
16
docs/en/reference/solutions/distance_calculation.md
Normal file
@ -0,0 +1,16 @@
|
||||
---
|
||||
description: Explore Ultralytics YOLO's distance calculation feature designed for advance analytics, providing an immediate, impactful way to interpret computer vision data.
|
||||
keywords: Ultralytics, YOLO, distance calculation, object tracking, data visualization, real-time tracking, machine learning, object counting, computer vision, vehicle analytics, YOLOv8, artificial intelligence
|
||||
---
|
||||
|
||||
# Reference for `ultralytics/solutions/distance_calculation.py`
|
||||
|
||||
!!! Note
|
||||
|
||||
This file is available at [https://github.com/ultralytics/ultralytics/blob/main/ultralytics/solutions/distance_calculation.py](https://github.com/ultralytics/ultralytics/blob/main/ultralytics/solutions/distance_calculation.py). If you spot a problem please help fix it by [contributing](https://docs.ultralytics.com/help/contributing/) a [Pull Request](https://github.com/ultralytics/ultralytics/edit/main/ultralytics/solutions/heatmap.py) 🛠️. Thank you 🙏!
|
||||
|
||||
<br><br>
|
||||
|
||||
## ::: ultralytics.solutions.distance_calculation.DistanceCalculation
|
||||
|
||||
<br><br>
|
||||
16
docs/en/reference/solutions/speed_estimation.md
Normal file
16
docs/en/reference/solutions/speed_estimation.md
Normal file
@ -0,0 +1,16 @@
|
||||
---
|
||||
description: Transform speed estimation with Ultralytics YOLO speed estimation featuring cutting-edge technology for precise real-time counting in video streams.
|
||||
keywords: Ultralytics YOLO, speed estimation software, real-time vehicle tracking solutions, video stream analysis, YOLOv8 object detection, smart counting technology, computer vision, AI-powered tracking, video analytics tools, automated monitoring.
|
||||
---
|
||||
|
||||
# Reference for `ultralytics/solutions/speed_estimation.py`
|
||||
|
||||
!!! Note
|
||||
|
||||
This file is available at [https://github.com/ultralytics/ultralytics/blob/main/ultralytics/solutions/speed_estimation.py](https://github.com/ultralytics/ultralytics/blob/main/ultralytics/solutions/speed_estimation.py). If you spot a problem please help fix it by [contributing](https://docs.ultralytics.com/help/contributing/) a [Pull Request](https://github.com/ultralytics/ultralytics/edit/main/ultralytics/solutions/object_counter.py) 🛠️. Thank you 🙏!
|
||||
|
||||
<br><br>
|
||||
|
||||
## ::: ultralytics.solutions.speed_estimation.SpeedEstimator
|
||||
|
||||
<br><br>
|
||||
@ -281,6 +281,8 @@ nav:
|
||||
- Heatmaps: guides/heatmaps.md
|
||||
- Instance Segmentation with Object Tracking: guides/instance-segmentation-and-tracking.md
|
||||
- VisionEye Mapping: guides/vision-eye.md
|
||||
- Speed Estimation: guides/speed-estimation.md
|
||||
- Distance Calculation: guides/distance-calculation.md
|
||||
- Integrations:
|
||||
- integrations/index.md
|
||||
- Comet ML: integrations/comet.md
|
||||
@ -429,6 +431,8 @@ nav:
|
||||
- ai_gym: reference/solutions/ai_gym.md
|
||||
- heatmap: reference/solutions/heatmap.md
|
||||
- object_counter: reference/solutions/object_counter.md
|
||||
- speed_estimation: reference/solutions/speed_estimation.md
|
||||
- distance_calculation: reference/solutions/distance_calculation.md
|
||||
- trackers:
|
||||
- basetrack: reference/trackers/basetrack.md
|
||||
- bot_sort: reference/trackers/bot_sort.md
|
||||
|
||||
187
ultralytics/solutions/distance_calculation.py
Normal file
187
ultralytics/solutions/distance_calculation.py
Normal file
@ -0,0 +1,187 @@
|
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license
|
||||
|
||||
import math
|
||||
|
||||
import cv2
|
||||
|
||||
from ultralytics.utils.plotting import Annotator, colors
|
||||
|
||||
|
||||
class DistanceCalculation:
|
||||
"""A class to calculate distance between two objects in real-time video stream based on their tracks."""
|
||||
|
||||
def __init__(self):
|
||||
"""Initializes the distance calculation class with default values for Visual, Image, track and distance
|
||||
parameters.
|
||||
"""
|
||||
|
||||
# Visual & im0 information
|
||||
self.im0 = None
|
||||
self.annotator = None
|
||||
self.view_img = False
|
||||
self.line_color = (255, 255, 0)
|
||||
self.centroid_color = (255, 0, 255)
|
||||
|
||||
# Predict/track information
|
||||
self.clss = None
|
||||
self.names = None
|
||||
self.boxes = None
|
||||
self.line_thickness = 2
|
||||
self.trk_ids = None
|
||||
|
||||
# Distance calculation information
|
||||
self.centroids = []
|
||||
self.pixel_per_meter = 10
|
||||
|
||||
# Mouse event
|
||||
self.left_mouse_count = 0
|
||||
self.selected_boxes = {}
|
||||
|
||||
def set_args(self,
|
||||
names,
|
||||
pixels_per_meter=10,
|
||||
view_img=False,
|
||||
line_thickness=2,
|
||||
line_color=(255, 255, 0),
|
||||
centroid_color=(255, 0, 255)):
|
||||
"""
|
||||
Configures the distance calculation and display parameters.
|
||||
|
||||
Args:
|
||||
names (dict): object detection classes names
|
||||
pixels_per_meter (int): Number of pixels in meter
|
||||
view_img (bool): Flag indicating frame display
|
||||
line_thickness (int): Line thickness for bounding boxes.
|
||||
line_color (RGB): color of centroids line
|
||||
centroid_color (RGB): colors of bbox centroids
|
||||
"""
|
||||
self.names = names
|
||||
self.pixel_per_meter = pixels_per_meter
|
||||
self.view_img = view_img
|
||||
self.line_thickness = line_thickness
|
||||
self.line_color = line_color
|
||||
self.centroid_color = centroid_color
|
||||
|
||||
def mouse_event_for_distance(self, event, x, y, flags, param):
|
||||
"""
|
||||
This function is designed to move region with mouse events in a real-time video stream.
|
||||
|
||||
Args:
|
||||
event (int): The type of mouse event (e.g., cv2.EVENT_MOUSEMOVE, cv2.EVENT_LBUTTONDOWN, etc.).
|
||||
x (int): The x-coordinate of the mouse pointer.
|
||||
y (int): The y-coordinate of the mouse pointer.
|
||||
flags (int): Any flags associated with the event (e.g., cv2.EVENT_FLAG_CTRLKEY,
|
||||
cv2.EVENT_FLAG_SHIFTKEY, etc.).
|
||||
param (dict): Additional parameters you may want to pass to the function.
|
||||
"""
|
||||
global selected_boxes
|
||||
global left_mouse_count
|
||||
if event == cv2.EVENT_LBUTTONDOWN:
|
||||
self.left_mouse_count += 1
|
||||
if self.left_mouse_count <= 2:
|
||||
for box, track_id in zip(self.boxes, self.trk_ids):
|
||||
if box[0] < x < box[2] and box[1] < y < box[3]:
|
||||
if track_id not in self.selected_boxes:
|
||||
self.selected_boxes[track_id] = []
|
||||
self.selected_boxes[track_id] = box
|
||||
|
||||
if event == cv2.EVENT_RBUTTONDOWN:
|
||||
self.selected_boxes = {}
|
||||
self.left_mouse_count = 0
|
||||
|
||||
def extract_tracks(self, tracks):
|
||||
"""
|
||||
Extracts results from the provided data.
|
||||
|
||||
Args:
|
||||
tracks (list): List of tracks obtained from the object tracking process.
|
||||
"""
|
||||
self.boxes = tracks[0].boxes.xyxy.cpu()
|
||||
self.clss = tracks[0].boxes.cls.cpu().tolist()
|
||||
self.trk_ids = tracks[0].boxes.id.int().cpu().tolist()
|
||||
|
||||
def calculate_centroid(self, box):
|
||||
"""
|
||||
Calculate the centroid of bounding box
|
||||
Args:
|
||||
box (list): Bounding box data
|
||||
"""
|
||||
return int((box[0] + box[2]) // 2), int((box[1] + box[3]) // 2)
|
||||
|
||||
def calculate_distance(self, centroid1, centroid2):
|
||||
"""
|
||||
Calculate distance between two centroids
|
||||
Args:
|
||||
centroid1 (point): First bounding box data
|
||||
centroid2 (point): Second bounding box data
|
||||
"""
|
||||
pixel_distance = math.sqrt((centroid1[0] - centroid2[0]) ** 2 + (centroid1[1] - centroid2[1]) ** 2)
|
||||
return pixel_distance / self.pixel_per_meter
|
||||
|
||||
def plot_distance_and_line(self, distance):
|
||||
"""
|
||||
Plot the distance and line on frame
|
||||
Args:
|
||||
distance (float): Distance between two centroids
|
||||
"""
|
||||
cv2.rectangle(self.im0, (15, 25), (280, 70), (255, 255, 255), -1)
|
||||
cv2.putText(self.im0, f'Distance : {distance:.2f}m', (20, 55), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 0), 2,
|
||||
cv2.LINE_AA)
|
||||
cv2.line(self.im0, self.centroids[0], self.centroids[1], self.line_color, 3)
|
||||
cv2.circle(self.im0, self.centroids[0], 6, self.centroid_color, -1)
|
||||
cv2.circle(self.im0, self.centroids[1], 6, self.centroid_color, -1)
|
||||
|
||||
def start_process(self, im0, tracks):
|
||||
"""
|
||||
Calculate distance between two bounding boxes based on tracking data
|
||||
Args:
|
||||
im0 (nd array): Image
|
||||
tracks (list): List of tracks obtained from the object tracking process.
|
||||
"""
|
||||
self.im0 = im0
|
||||
if tracks[0].boxes.id is None:
|
||||
if self.view_img:
|
||||
self.display_frames()
|
||||
return
|
||||
else:
|
||||
return
|
||||
|
||||
self.extract_tracks(tracks)
|
||||
|
||||
self.annotator = Annotator(self.im0, line_width=2)
|
||||
|
||||
for box, cls, track_id in zip(self.boxes, self.clss, self.trk_ids):
|
||||
self.annotator.box_label(box, color=colors(int(cls), True), label=self.names[int(cls)])
|
||||
|
||||
if len(self.selected_boxes) == 2:
|
||||
for trk_id, _ in self.selected_boxes.items():
|
||||
if trk_id == track_id:
|
||||
self.selected_boxes[track_id] = box
|
||||
|
||||
if len(self.selected_boxes) == 2:
|
||||
for trk_id, box in self.selected_boxes.items():
|
||||
centroid = self.calculate_centroid(self.selected_boxes[trk_id])
|
||||
self.centroids.append(centroid)
|
||||
|
||||
distance = self.calculate_distance(self.centroids[0], self.centroids[1])
|
||||
self.plot_distance_and_line(distance)
|
||||
|
||||
self.centroids = []
|
||||
|
||||
if self.view_img:
|
||||
self.display_frames()
|
||||
|
||||
return im0
|
||||
|
||||
def display_frames(self):
|
||||
"""Display frame."""
|
||||
cv2.namedWindow('Ultralytics Distance Estimation')
|
||||
cv2.setMouseCallback('Ultralytics Distance Estimation', self.mouse_event_for_distance)
|
||||
cv2.imshow('Ultralytics Distance Estimation', self.im0)
|
||||
|
||||
if cv2.waitKey(1) & 0xFF == ord('q'):
|
||||
return
|
||||
|
||||
|
||||
if __name__ == '__main__':
|
||||
DistanceCalculation()
|
||||
@ -158,7 +158,11 @@ class Heatmap:
|
||||
"""
|
||||
self.im0 = im0
|
||||
if tracks[0].boxes.id is None:
|
||||
return self.im0
|
||||
if self.view_img and self.env_check:
|
||||
self.display_frames()
|
||||
return
|
||||
else:
|
||||
return
|
||||
|
||||
self.heatmap *= self.decay_factor # decay factor
|
||||
self.extract_results(tracks)
|
||||
@ -240,22 +244,16 @@ class Heatmap:
|
||||
txt_color=self.count_txt_color,
|
||||
color=self.count_color)
|
||||
|
||||
im0_with_heatmap = cv2.addWeighted(self.im0, 1 - self.heatmap_alpha, heatmap_colored, self.heatmap_alpha, 0)
|
||||
self.im0 = cv2.addWeighted(self.im0, 1 - self.heatmap_alpha, heatmap_colored, self.heatmap_alpha, 0)
|
||||
|
||||
if self.env_check and self.view_img:
|
||||
self.display_frames(im0_with_heatmap)
|
||||
self.display_frames()
|
||||
|
||||
return im0_with_heatmap
|
||||
return self.im0
|
||||
|
||||
@staticmethod
|
||||
def display_frames(im0_with_heatmap):
|
||||
"""
|
||||
Display heatmap.
|
||||
|
||||
Args:
|
||||
im0_with_heatmap (nd array): Original Image with heatmap
|
||||
"""
|
||||
cv2.imshow('Ultralytics Heatmap', im0_with_heatmap)
|
||||
def display_frames(self):
|
||||
"""Display frame."""
|
||||
cv2.imshow('Ultralytics Heatmap', self.im0)
|
||||
|
||||
if cv2.waitKey(1) & 0xFF == ord('q'):
|
||||
return
|
||||
|
||||
@ -198,7 +198,9 @@ class ObjectCounter:
|
||||
txt_color=self.count_txt_color,
|
||||
color=self.count_color)
|
||||
|
||||
if self.env_check and self.view_img:
|
||||
def display_frames(self):
|
||||
"""Display frame."""
|
||||
if self.env_check:
|
||||
cv2.namedWindow('Ultralytics YOLOv8 Object Counter')
|
||||
if len(self.reg_pts) == 4: # only add mouse event If user drawn region
|
||||
cv2.setMouseCallback('Ultralytics YOLOv8 Object Counter', self.mouse_event_for_region,
|
||||
@ -219,8 +221,15 @@ class ObjectCounter:
|
||||
self.im0 = im0 # store image
|
||||
|
||||
if tracks[0].boxes.id is None:
|
||||
if self.view_img:
|
||||
self.display_frames()
|
||||
return
|
||||
else:
|
||||
return
|
||||
self.extract_and_process_tracks(tracks)
|
||||
|
||||
if self.view_img:
|
||||
self.display_frames()
|
||||
return self.im0
|
||||
|
||||
|
||||
|
||||
203
ultralytics/solutions/speed_estimation.py
Normal file
203
ultralytics/solutions/speed_estimation.py
Normal file
@ -0,0 +1,203 @@
|
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license
|
||||
|
||||
from collections import defaultdict
|
||||
from time import time
|
||||
|
||||
import cv2
|
||||
import numpy as np
|
||||
|
||||
from ultralytics.utils.checks import check_imshow
|
||||
from ultralytics.utils.plotting import Annotator, colors
|
||||
|
||||
|
||||
class SpeedEstimator:
|
||||
"""A class to estimation speed of objects in real-time video stream based on their tracks."""
|
||||
|
||||
def __init__(self):
|
||||
"""Initializes the speed-estimator class with default values for Visual, Image, track and speed parameters."""
|
||||
|
||||
# Visual & im0 information
|
||||
self.im0 = None
|
||||
self.annotator = None
|
||||
self.view_img = False
|
||||
|
||||
# Region information
|
||||
self.reg_pts = [(20, 400), (1260, 400)]
|
||||
self.region_thickness = 3
|
||||
|
||||
# Predict/track information
|
||||
self.clss = None
|
||||
self.names = None
|
||||
self.boxes = None
|
||||
self.trk_ids = None
|
||||
self.trk_pts = None
|
||||
self.line_thickness = 2
|
||||
self.trk_history = defaultdict(list)
|
||||
|
||||
# Speed estimator information
|
||||
self.current_time = 0
|
||||
self.dist_data = {}
|
||||
self.trk_idslist = []
|
||||
self.spdl_dist_thresh = 10
|
||||
self.trk_previous_times = {}
|
||||
self.trk_previous_points = {}
|
||||
|
||||
# Check if environment support imshow
|
||||
self.env_check = check_imshow(warn=True)
|
||||
|
||||
def set_args(
|
||||
self,
|
||||
reg_pts,
|
||||
names,
|
||||
view_img=False,
|
||||
line_thickness=2,
|
||||
region_thickness=5,
|
||||
spdl_dist_thresh=10,
|
||||
):
|
||||
"""
|
||||
Configures the speed estimation and display parameters.
|
||||
|
||||
Args:
|
||||
reg_pts (list): Initial list of points defining the speed calculation region.
|
||||
names (dict): object detection classes names
|
||||
view_img (bool): Flag indicating frame display
|
||||
line_thickness (int): Line thickness for bounding boxes.
|
||||
region_thickness (int): Speed estimation region thickness
|
||||
spdl_dist_thresh (int): Euclidean distance threshold for speed line
|
||||
"""
|
||||
if reg_pts is None:
|
||||
print('Region points not provided, using default values')
|
||||
else:
|
||||
self.reg_pts = reg_pts
|
||||
self.names = names
|
||||
self.view_img = view_img
|
||||
self.line_thickness = line_thickness
|
||||
self.region_thickness = region_thickness
|
||||
self.spdl_dist_thresh = spdl_dist_thresh
|
||||
|
||||
def extract_tracks(self, tracks):
|
||||
"""
|
||||
Extracts results from the provided data.
|
||||
|
||||
Args:
|
||||
tracks (list): List of tracks obtained from the object tracking process.
|
||||
"""
|
||||
self.boxes = tracks[0].boxes.xyxy.cpu()
|
||||
self.clss = tracks[0].boxes.cls.cpu().tolist()
|
||||
self.trk_ids = tracks[0].boxes.id.int().cpu().tolist()
|
||||
|
||||
def store_track_info(self, track_id, box):
|
||||
"""
|
||||
Store track data.
|
||||
|
||||
Args:
|
||||
track_id (int): object track id.
|
||||
box (list): object bounding box data
|
||||
"""
|
||||
track = self.trk_history[track_id]
|
||||
bbox_center = (float((box[0] + box[2]) / 2), float((box[1] + box[3]) / 2))
|
||||
track.append(bbox_center)
|
||||
|
||||
if len(track) > 30:
|
||||
track.pop(0)
|
||||
|
||||
self.trk_pts = np.hstack(track).astype(np.int32).reshape((-1, 1, 2))
|
||||
return track
|
||||
|
||||
def plot_box_and_track(self, track_id, box, cls, track):
|
||||
"""
|
||||
Plot track and bounding box.
|
||||
|
||||
Args:
|
||||
track_id (int): object track id.
|
||||
box (list): object bounding box data
|
||||
cls (str): object class name
|
||||
track (list): tracking history for tracks path drawing
|
||||
"""
|
||||
speed_label = str(int(
|
||||
self.dist_data[track_id])) + 'km/ph' if track_id in self.dist_data else self.names[int(cls)]
|
||||
bbox_color = colors(int(track_id)) if track_id in self.dist_data else (255, 0, 255)
|
||||
|
||||
self.annotator.box_label(box, speed_label, bbox_color)
|
||||
|
||||
cv2.polylines(self.im0, [self.trk_pts], isClosed=False, color=(0, 255, 0), thickness=1)
|
||||
cv2.circle(self.im0, (int(track[-1][0]), int(track[-1][1])), 5, bbox_color, -1)
|
||||
|
||||
def calculate_speed(self, trk_id, track):
|
||||
"""
|
||||
Calculation of object speed
|
||||
Args:
|
||||
trk_id (int): object track id.
|
||||
track (list): tracking history for tracks path drawing
|
||||
"""
|
||||
|
||||
if self.reg_pts[0][0] < track[-1][0] < self.reg_pts[1][0]:
|
||||
|
||||
if (self.reg_pts[1][1] - self.spdl_dist_thresh < track[-1][1] < self.reg_pts[1][1] + self.spdl_dist_thresh):
|
||||
direction = 'known'
|
||||
|
||||
elif (self.reg_pts[0][1] - self.spdl_dist_thresh < track[-1][1] <
|
||||
self.reg_pts[0][1] + self.spdl_dist_thresh):
|
||||
direction = 'known'
|
||||
|
||||
else:
|
||||
direction = 'unknown'
|
||||
|
||||
if self.trk_previous_times[trk_id] != 0 and direction != 'unknown':
|
||||
|
||||
if trk_id not in self.trk_idslist:
|
||||
self.trk_idslist.append(trk_id)
|
||||
|
||||
time_difference = time() - self.trk_previous_times[trk_id]
|
||||
if time_difference > 0:
|
||||
dist_difference = np.abs(track[-1][1] - self.trk_previous_points[trk_id][1])
|
||||
speed = dist_difference / time_difference
|
||||
self.dist_data[trk_id] = speed
|
||||
|
||||
self.trk_previous_times[trk_id] = time()
|
||||
self.trk_previous_points[trk_id] = track[-1]
|
||||
|
||||
def estimate_speed(self, im0, tracks):
|
||||
"""
|
||||
Calculate object based on tracking data
|
||||
Args:
|
||||
im0 (nd array): Image
|
||||
tracks (list): List of tracks obtained from the object tracking process.
|
||||
"""
|
||||
self.im0 = im0
|
||||
if tracks[0].boxes.id is None:
|
||||
if self.view_img and self.env_check:
|
||||
self.display_frames()
|
||||
return
|
||||
else:
|
||||
return
|
||||
|
||||
self.extract_tracks(tracks)
|
||||
|
||||
self.annotator = Annotator(self.im0, line_width=2)
|
||||
self.annotator.draw_region(reg_pts=self.reg_pts, color=(255, 0, 0), thickness=self.region_thickness)
|
||||
|
||||
for box, trk_id, cls in zip(self.boxes, self.trk_ids, self.clss):
|
||||
|
||||
track = self.store_track_info(trk_id, box)
|
||||
|
||||
if trk_id not in self.trk_previous_times:
|
||||
self.trk_previous_times[trk_id] = 0
|
||||
|
||||
self.plot_box_and_track(trk_id, box, cls, track)
|
||||
self.calculate_speed(trk_id, track)
|
||||
|
||||
if self.view_img and self.env_check:
|
||||
self.display_frames()
|
||||
|
||||
return im0
|
||||
|
||||
def display_frames(self):
|
||||
"""Display frame."""
|
||||
cv2.imshow('Ultralytics Speed Estimation', self.im0)
|
||||
if cv2.waitKey(1) & 0xFF == ord('q'):
|
||||
return
|
||||
|
||||
|
||||
if __name__ == '__main__':
|
||||
SpeedEstimator()
|
||||
Loading…
x
Reference in New Issue
Block a user