---
comments: true
description: VisionEye View Object Mapping using Ultralytics YOLOv8
keywords: Ultralytics, YOLOv8, Object Detection, Object Tracking, IDetection, VisionEye, Computer Vision, Notebook, IPython Kernel, CLI, Python SDK
---
# VisionEye View Object Mapping using Ultralytics YOLOv8 🚀
## What is VisionEye Object Mapping?
[Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) VisionEye offers the capability for computers to identify and pinpoint objects, simulating the observational precision of the human eye. This functionality enables computers to discern and focus on specific objects, much like the way the human eye observes details from a particular viewpoint.
## Samples
| VisionEye View | VisionEye View With Object Tracking | VisionEye View With Distance Calculation |
|:------------------------------------------------------------------------------------------------------------------------------------------------------------:|:---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------:|:-------------------------------------------------------------------------------------------------------------------------------------------------------------------------:|
|  |  | 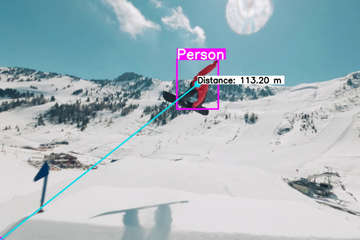 |
| VisionEye View Object Mapping using Ultralytics YOLOv8 | VisionEye View Object Mapping with Object Tracking using Ultralytics YOLOv8 | VisionEye View with Distance Calculation using Ultralytics YOLOv8 |
!!! Example "VisionEye Object Mapping using YOLOv8"
=== "VisionEye Object Mapping"
```python
import cv2
from ultralytics import YOLO
from ultralytics.utils.plotting import colors, Annotator
model = YOLO("yolov8n.pt")
names = model.model.names
cap = cv2.VideoCapture("path/to/video/file.mp4")
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
out = cv2.VideoWriter('visioneye-pinpoint.avi', cv2.VideoWriter_fourcc(*'MJPG'), fps, (w, h))
center_point = (-10, h)
while True:
ret, im0 = cap.read()
if not ret:
print("Video frame is empty or video processing has been successfully completed.")
break
results = model.predict(im0)
boxes = results[0].boxes.xyxy.cpu()
clss = results[0].boxes.cls.cpu().tolist()
annotator = Annotator(im0, line_width=2)
for box, cls in zip(boxes, clss):
annotator.box_label(box, label=names[int(cls)], color=colors(int(cls)))
annotator.visioneye(box, center_point)
out.write(im0)
cv2.imshow("visioneye-pinpoint", im0)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
out.release()
cap.release()
cv2.destroyAllWindows()
```
=== "VisionEye Object Mapping with Object Tracking"
```python
import cv2
from ultralytics import YOLO
from ultralytics.utils.plotting import colors, Annotator
model = YOLO("yolov8n.pt")
cap = cv2.VideoCapture("path/to/video/file.mp4")
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
out = cv2.VideoWriter('visioneye-pinpoint.avi', cv2.VideoWriter_fourcc(*'MJPG'), fps, (w, h))
center_point = (-10, h)
while True:
ret, im0 = cap.read()
if not ret:
print("Video frame is empty or video processing has been successfully completed.")
break
annotator = Annotator(im0, line_width=2)
results = model.track(im0, persist=True)
boxes = results[0].boxes.xyxy.cpu()
if results[0].boxes.id is not None:
track_ids = results[0].boxes.id.int().cpu().tolist()
for box, track_id in zip(boxes, track_ids):
annotator.box_label(box, label=str(track_id), color=colors(int(track_id)))
annotator.visioneye(box, center_point)
out.write(im0)
cv2.imshow("visioneye-pinpoint", im0)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
out.release()
cap.release()
cv2.destroyAllWindows()
```
=== "VisionEye with Distance Calculation"
```python
import cv2
import math
from ultralytics import YOLO
from ultralytics.utils.plotting import Annotator, colors
model = YOLO("yolov8s.pt")
cap = cv2.VideoCapture("Path/to/video/file.mp4")
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
out = cv2.VideoWriter('visioneye-distance-calculation.avi', cv2.VideoWriter_fourcc(*'MJPG'), fps, (w, h))
center_point = (0, h)
pixel_per_meter = 10
txt_color, txt_background, bbox_clr = ((0, 0, 0), (255, 255, 255), (255, 0, 255))
while True:
ret, im0 = cap.read()
if not ret:
print("Video frame is empty or video processing has been successfully completed.")
break
annotator = Annotator(im0, line_width=2)
results = model.track(im0, persist=True)
boxes = results[0].boxes.xyxy.cpu()
if results[0].boxes.id is not None:
track_ids = results[0].boxes.id.int().cpu().tolist()
for box, track_id in zip(boxes, track_ids):
annotator.box_label(box, label=str(track_id), color=bbox_clr)
annotator.visioneye(box, center_point)
x1, y1 = int((box[0] + box[2]) // 2), int((box[1] + box[3]) // 2) # Bounding box centroid
distance = (math.sqrt((x1 - center_point[0]) ** 2 + (y1 - center_point[1]) ** 2))/pixel_per_meter
text_size, _ = cv2.getTextSize(f"Distance: {distance:.2f} m", cv2.FONT_HERSHEY_SIMPLEX,1.2, 3)
cv2.rectangle(im0, (x1, y1 - text_size[1] - 10),(x1 + text_size[0] + 10, y1), txt_background, -1)
cv2.putText(im0, f"Distance: {distance:.2f} m",(x1, y1 - 5), cv2.FONT_HERSHEY_SIMPLEX, 1.2,txt_color, 3)
out.write(im0)
cv2.imshow("visioneye-distance-calculation", im0)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
out.release()
cap.release()
cv2.destroyAllWindows()
```
### `visioneye` Arguments
| Name | Type | Default | Description |
|---------------|---------|------------------|--------------------------------------------------|
| `color` | `tuple` | `(235, 219, 11)` | Line and object centroid color |
| `pin_color` | `tuple` | `(255, 0, 255)` | VisionEye pinpoint color |
| `thickness` | `int` | `2` | pinpoint to object line thickness |
| `pins_radius` | `int` | `10` | Pinpoint and object centroid point circle radius |
## Note
For any inquiries, feel free to post your questions in the [Ultralytics Issue Section](https://github.com/ultralytics/ultralytics/issues/new/choose) or the discussion section mentioned below.